
Chemical Robots and Machines
Belousov-Zhabotinsky Gels (BZ Gels)

When the Belousov-Zhabotinsky (BZ) reaction is induced inside a gel, which generates a spatio-temporal pattern, the gel generates autonomous volume oscillations and peristaltic motions. We utilize the BZ reaction and create new soft machines and robots.
- S. Maeda, Y. Hara, T. Sakai, R. Yoshida, S. Hashimoto, “Self-walking gel“, Adv. Mater., 19, 3480-3484, 2007.
- S. Maeda, Y. Hara, R. Yoshida and S. Hashimoto, “Peristaltic Motion of Polymer Gels“, Angew. Chem. Int. Ed., 47, 6690–6693, 2008.
- S. Maeda, T. Kato, Y. Otsuka, N. Hosoya, C. Matteo, C. Laschi, “Large deformation of self-oscillating polymer gel“, Phys. Rev. E, 93, 010501(R), 2016.
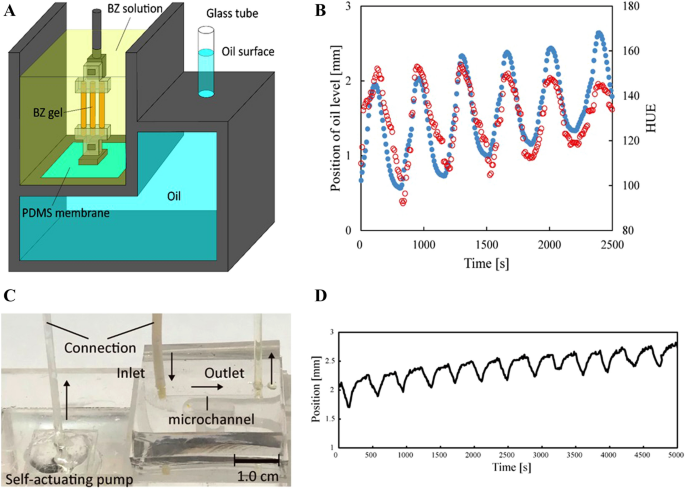
- K. Yoshimura et al., “Autonomous oil flow generated by self-oscillating polymer gels“, Sci. Rep., 10, 12834, 2020.
- Z. Mao, M. Kuroki, Y. Otsuka, S. Maeda, “Contraction waves in self-oscillating polymer gels“, Extreme Mech. Lett., 39, 100830, 2020.
- Y. Yamada, H. Ito, S. Maeda, “Artificial temperature-compensated biological clock using temperature-sensitive Belousov-Zhabotinsky gels“, Sci. Rep., 12, 22436, 2022.
- Y. Yamada, Y. Otsuka, Z. Mao, and S. Maeda, “Periodical propagation of torsion in polymer gels“, Sci. Rep., 12, 16679, 2022.
Gel Motors

The Marangoni effect has inspired the development of diverse applications such as robots, gel motors, and selfpropelled droplets. A major challenge for the developed gel motors is the need for stators, which dampen the rotating velocity and reduce the motor lifetime due to frictional forces from the stators. Therefore, we developed a new type of gel without a stator to realize rotating motions, namely, a conical frustum gel. In this work, we initially studied the principle of the rotated gels driven by the Marangoni effect. For comparison, we designed two types of gels: cylindrical and conical frustum gels. Then we devised mathematic models to estimate the generated torques. The two gels were synthesized. Additionally, both the oil and aqueous fluids were prepared. Next, we investigated the influence of a chemical on the moving duration of the gels. The circular motion trajectories of the gels were compared and analyzed. Finally, we researched the angular velocities and driving torques generated by the two gels. This work should contribute to the development of a non-stator gel motor
powered by the Marangoni effect.
- Z. Mao, G. Shimamoto, S. Maeda, “Conical frustum gel driven by Marangoni effects for no-stator motor“, Colloids and Surfaces A, 608, 12561, 2021
Soft Mechatronics
Dielectric Elastomer Actuators (DEAs)

DEAs consists of a dielectric elastomer membrane sandwiched between two stretchable electrodes. Applying a voltage to stretchable electrodes generates an attractive electrostatic force between the electrodes. Typically, a kV range is required to drive DEAs with a thickness of hundreds of micrometers. The electrostatic force generated between the electrodes produces a pressure that squeezes the DE membrane in the thickness direction (z-direction) and expands the in-plane direction due to the incompressibility effect of the elastomer. We promote devices using DEAs and research on on the low voltage of DEA.
- A. Wiranata, M. Kanno, N. Chiya, H.Okabe, T. Horii, T. Fujie, N. Hosoya, S. Maeda, “High-Frequency Oscillations of Low-Voltage Dielectric Elastomer Actuators”, APEX, 15, 011002, 2022.
- A. Minaminosono, H. Shigemune, T. Murakami, S. Maeda, “Untethered rotational system with a stacked dielectric elastomer actuator“, Smart Mater. Struct., 30, 065007, 2021.
- A. Wiranata, Y. Ishii, H. Hosoya and S. Maeda, “Simple and Reliable Fabrication Method for PDMS Dielectric Elastomer Actuators using Carbon Nanotube Powder Electrodes“, Adv. Eng. Mater., 23, 2001181, 2021.
Stretchable suction cup with electroadhesion

Suction cups are commonly used as adhering and grasping devices. This study proposes a methodology to expand the applicability of suction cups. A suction cup is developed with a soft pad which consists of stretchable electrodes and insulating layers that bond to the bottom of the main body of the suction cup. When the stretchable electrodes generate an electrostatic attraction between the electrodes and the object, the pad deforms, filling the gaps between the pad and the object. Due to the soft pad, the amount of incoming air is significantly reduced compared to a normal suction cup. Experiments reveal the effect of these features. Applying a high voltage to the stretchable electrodes increases the holding success ratio of the suction cup in the normal direction for smooth and rough surfaces due to the stretchable electrodes. Measuring the negative pressure inside the suction cup confirms that the electrostatic force maintains the adhesion force on both smooth and rough surfaces. Thus, the electrostatic force and stretchability of the soft pad greatly increase the adhesion force of the suction cup. Furthermore, the electrostatic force prevents a slip of the suction cup, which improves the performance of the suction cup.
- Y. Okuno, H. Shigemune, Y. Kuwajima S. Maeda, “Stretchable Suction Cup with Electroadhesion“, Adv. Mater. Tech., 4,1-6, 2018.
Soft EHD Machines
ElectroHydroDynamics (EHD)

ElectroHydroDynamics (EHD) is a phenomenon that a flow is produced in insulating fluid held by electrodes by applying a high voltage to the electrodes. EHD has advantages of small size, light weight, immediate responsiveness, and high power density. Recent development of medical robots and artificial limb focus on small-size and lightweight actuators. Especially artificial hand development has been adopting motors and pneumatic actuators as driving force. However those actuators accompany by mechanical noise and require compressors outside. We are focusing on EHD to develop new actuators.
- Y. Kuwajima, H. Shigemune, V. Cacucciolo, M. Cianchetti, C. Laschi, S. Maeda, “Active suction cup actuated by ElectroHydroDynamics phenomenon“, Proc. IEEE/RSJ Intelligent Robots and Systems, 470-475, 2017.
- V. Cacucciolo, H. Shigemune, C. Matteo, C. Laschi, S. Maeda, “Conduction ElectroHydroDynamics with Mobile Electrodes: a novel Actuation System for Untethered Robots”, Adv. Sci., 4, 1600495, 2017.
Flexible EHD pumps



We have succeeded in fabricating a highly reproducible EHD pump in a short time by digital fabrication using a cutting plotter and laser cutter. We have also constructed a simple mathematical model of the electrode arrangement in the EHD pump and analytically obtained the optimal electrode arrangement. The result is a flexible EHD pump that maximizes the pressure generated per unit length. Since the output direction can be controlled by the polarity of the applied voltage and our flexible EHD pump can operate even when deformed, it has potential for wearable device applications.
- Y. Kuwajima, Y. Seki, Y. Yuhei, S. Awaki, S. Kamiyauchi, A. Wiranata, Y. Okuno, H. Shigemune, S. Maeda, “Electro-Chemical Dual-Transducer for Fluidic Self-Sensing Actuation”, ACS Appl. Mater. Interfaces, 14, 2, 3496-3503, 2022.
- Y. Seki, Y. Kuwajima, H. Shigemune, Y. Yamada, S. Maeda,” Optimization of the Electrode Arrangement and Reliable Fabrication of Flexible EHD Pumps“, Journal of Robotics and Mechatronics, 32, pp.939-946, 2020.
- V. Cacucciolo, J. Shintake, Y. Kuwajima, S. Maeda, D. Floreano and H. Shea, “Stretchable pumps for soft machines“, Nature, 572, pp.516–519, 2019.
Modeling and Analysis for Soft Mechanics
Cellular materials

Cellular materials are ubiquitous in nature systems and a variety of engineering fields. Although structural disorder in the cellular material plays an important role for the mechanical property, it is not well studied from the view point of physics. This study proposes a simple compression beam grid model of a cellular material as a minimal model for discussing the role of disorder.
- Y. Yamada and S. Maeda, “Simple model for compression of cellular materials exhibiting serial buckling of the microstructure“, Journal of Physical Society of Japan, 90, 114003, 2021.
11,682 total views, 2 views today
